Domain Adaptation Through Task Distillation
Brady Zhou, Nimit Kalra, Philipp KrähenbühlECCV 2020
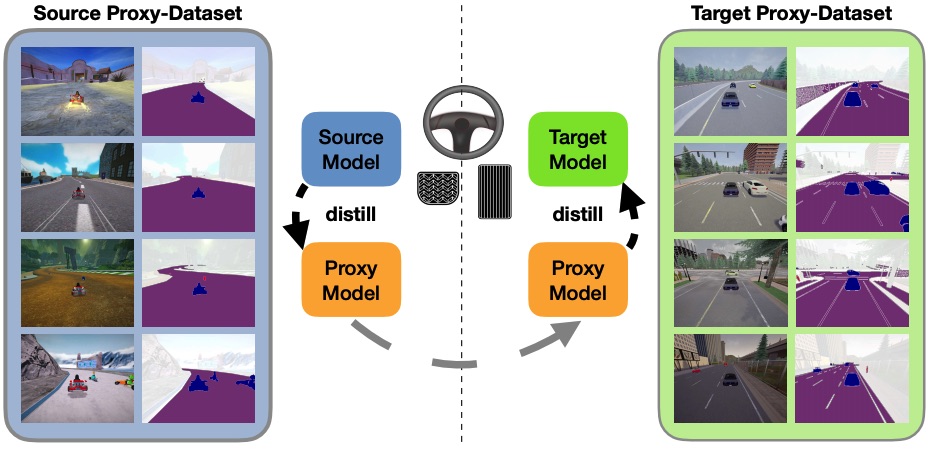
Deep networks devour millions of precisely annotated images to build their complex and powerful representations. Unfortunately, tasks like autonomous driving have virtually no real-world training data. Repeatedly crashing a car into a tree is simply too expensive. The commonly prescribed solution is simple: learn a representation in simulation and transfer it to the real world. However, this transfer is challenging since simulated and real-world visual experiences vary dramatically. Our core observation is that for certain tasks, such as image recognition, datasets are plentiful. They exist in any interesting domain, simulated or real, and are easy to label and extend. We use these recognition datasets to link up a source and target domain to transfer models between them in a task distillation framework. Our method can successfully transfer navigation policies between drastically different simulators: ViZDoom, SuperTuxKart, and CARLA. Furthermore, it shows promising results on standard domain adaptation benchmarks.