Cascade R-CNN: Delving into High Quality Object Detection, Cai, Vasconcelos; 2017 - Summary
| author: | mmcinnestaylor |
| score: | 8 / 10 |
Core Idea
- In object detection, an intersection over union (IoU) threshold is used to define the percentage of overlap of a predicted bounding box over the ground truth bounding box in order to be considered a positive sample.
- Cascade R-CNN uses a sequence of detectors with increasing IoU thresholds, leading to higher selectivity against false positives. The output distribution of a lower quality detector at the previous stage is used as input for a higher quality detector at the successive stage.
- The cascade procedure helps reduce overfitting during training, and leads to closer matches between the hypothesis and detector quality at each stage during inference.
Technical Implementation
- The architecture is framed as a cascaded regression problem:
-
\[f(x,\textbf{b}) = f_T\circ f_{T-1}\circ...\circ f_1(x,\textbf{b})\]
- Here, \(T\) is the total number of cascade stages.
- Each regressor \(f_t\) is optimized w.r.t. the sample distribution \(\textbf{b}^t\) which arrives at stage \(t\) instead of the initial distribution \(\textbf{b}^1\)
-
\[f(x,\textbf{b}) = f_T\circ f_{T-1}\circ...\circ f_1(x,\textbf{b})\]
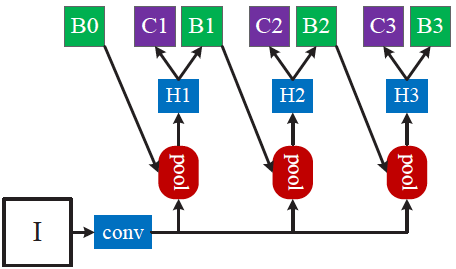
- Each stage \(t\in T\) includes a classifier \(h_t\) and regressor \(f_t\) which are optimized for an IoU threshold \(u^t\) where \(u^t>u^{t-1}\)
- The above is achieved by minimizing the following loss:
-
\[L(x^t, g) = L_{cls}(h_t(x^t),y^t) + \lambda[y^t\geq 1]L_{loc}(f_t(x^t,\textbf{b}^t),\textbf{g})\]
- \[\textbf{b}^t = f_{t-1}(x^{t-1},\textbf{b}^{t-1})\]
- And where \(g\) is the ground truth object for \(x^t\), \(\lambda = 1\) is the tradeoff coefficient, \([\cdot]\) is the indicator function, and \(y^t\) is the label of \(x^t\) given \(u^t\)
- The function is the sum of two terms related to seperate tasks in object detection.
- The first term in the loss is related to the classification task, while the second term is related to the bounding box regression task
- The tradeoff coefficient helps manage the contribution of the two tasks to the overall loss
-
\[L(x^t, g) = L_{cls}(h_t(x^t),y^t) + \lambda[y^t\geq 1]L_{loc}(f_t(x^t,\textbf{b}^t),\textbf{g})\]
Variants
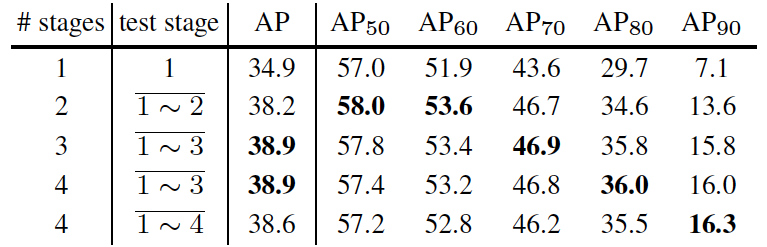
- Experiments were performed implementing the architecture while varying the number of cascade stages. The results are summarized below.
- 1~n denotes an emsemble of n classifiers on proposals at a stage
Results
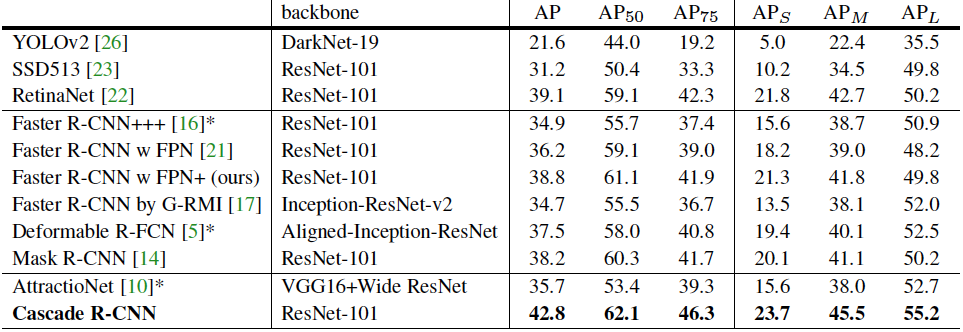
- The first table compares results of multiple state of the art single model object detectors.
- The first block are one-stage, the second block are two-stage, and the third block multi-stage
- Cascade R-CNN outperformed all other detectors in this comparison
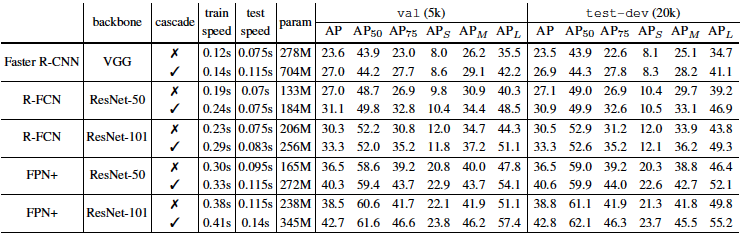
- The second table summarizes the cascade procedure applied to different detection architectures. The consistent improvement in detection performance led the authors to suggest that Cascade R-CNN had strong generalization capacity.
- The authors note that since the computational cost of a detection head is usually small compared to the Region Proposal Network, the computational overhead of the cascade procedure is thus small both during training and testing.
TL;DR
- Cascade R-CNN uses a series of connected stages with increasing IoU thresholds to achieve state of the art detection performance
- Experiments demonstrate the detection performance comes as a small increase in computational cost
- Experiments also demonstrate the architecture to be effective across a number of different backbones